- Квадрокоптеры
- Промышленные дроны
- Камеры и стедикамы
- Подавители БПЛА
- Квадрокоптеры
- Промышленные дроны
- Камеры и стедикамы
- Подавители БПЛА
© 2013 - 2026 | Официальный дистрибьютор DJI Россия

Цена по запросу














Особенности и преимущества:





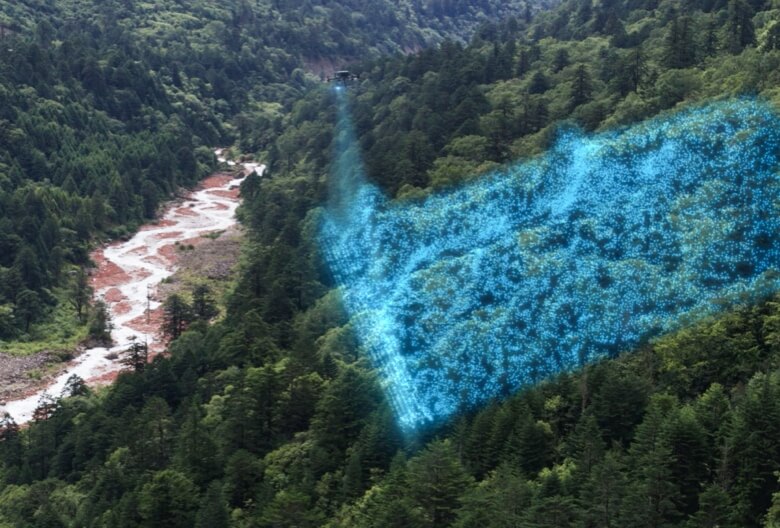
Zenmuse L2 объединила в одном корпусе LiDAR, высокоточную систему IMU собственной разработки и картографическую RGB-камеру с CMOS-матрицей размером 4/3. Предоставляемая в ваше распоряжение система обеспечит беспилотным промышленным платформам DJI более точный, эффективный и надежный сбор геопространственных данных. А при работе с приложением DJI Terra система становится готовым решением для сбора трехмерных данных и их высокоточной пост-обработки.
Высокая точность
Исключительная эффективность
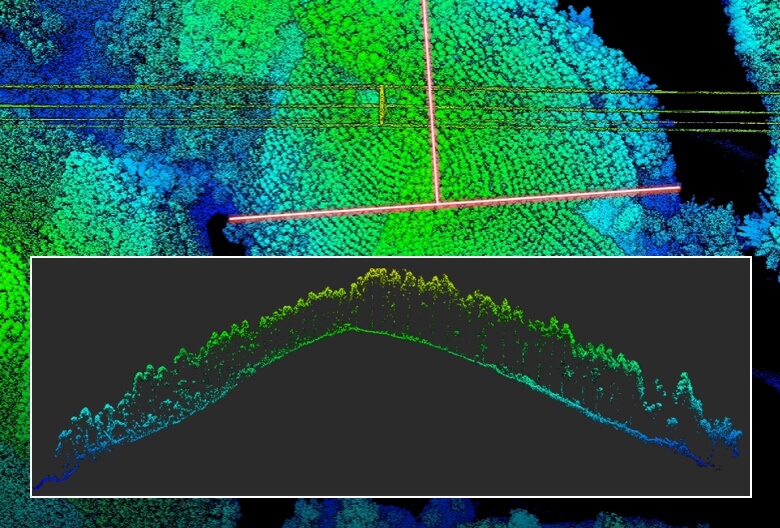
Большая глубина проницаемости
Эффективный диапазон обнаружения[3]
5 отражений
Готовое решение[4]
Облако точек в LiveView
Обработка в DJI Terra в 1 клик

Благодаря мощному аппаратному обеспечению Zenmuse L2 способна выполнить точное сканирование сложных объектов в расширенном диапазоне и с большей скоростью получить облако точек. Во время операций пользователи могут просматривать, воспроизводить и обрабатывать модели облаков точек на в реальном режиме времени прямо на месте проведения полетных миссий. В этом помогут также составленные в DJI Terra отчеты о качестве выполняемых. Такое подход предлагает простое и универсальное решение для повышения общей эффективности, а также получения результатов высокой точности с помощью комплексной пост-обработки.
Объединение возможностей систем глобального позиционирования и высокоточного инерциального модуля собственной разработки помогает добиться 4-см точности по вертикали и 5-см точности по горизонтали.[1]
Система готова к работе сразу же после ее включения. Она способна собирать геопространственные и RGB-данные с участка площадью 2,5 кв. км всего за один полет.[2]

При использовании вместе с промышленным квадрокоптером Matrice 350 RTK и приложением DJI Terra, Zenmuse L2 представляет собой готовое к работе решение, которое просто использовать даже новичкам.

L2 может обнаружить объекты на расстоянии от 250 метров при коэффициенте отражения 10% и 100 клкс[3] и на расстоянии до 450 метров при коэффициенте отражения 50% и 0 клк[3]. Обычная рабочая высота теперь увеличена до 120 метров. Это значительно повысит безопасность эксплуатации и эффективность.
Размер лазерного пятна был уменьшен до 4×12 см на 100 м. Это всего лишь 1/5 размера лазерного пятна у камеры Zenmuse L1. Но с пятном меньшего размера Zenmuse L2 не только обнаруживает объекты гораздо меньшего размера, чем предыдущие камеры, но и может проникать в более густую растительность, создавая более точные цифровые модели рельефа (DEM).
Такой режим полезен при работе в районах с густой растительностью, где Zenmuse L2 сможет фиксировать больше наземной информации, даже если она скрывается под густой листвой.
Как в режиме одиночного, так и в множественном сканирования L2 может достигать максимальной скорости создания облаков точек в 240000 точек в секунду. Это помогает получать больше данных за определенный период времени.
L2 поддерживает два режима сканирования для большей гибкости в работе в зависимости от специфики задач. В режиме повторяющегося сканирования LiDAR Zenmuse L2 может создавать более однородные и точные облака точек, одновременно выполняя задачи высокоточного картографирования. В режиме неповторяющегося сканирования система обеспечивает более глубокое проникновение для получения большего количества структурной информации. Это полезно для проверки линий электропередач, съемок в лесном хозяйстве и в других операциях.
Конструкция в едином корпусе обеспечивает эффективную скорость передачи данных облака точек до 100%. Вместе с 3-осевым стабилизатором система открывает больше возможностей для съемки.
Высокоточная система IMU собственной разработки в сочетании с системой позиционирования RTK дрона для объединения данных во время пост-обработки обеспечивает доступ Zenmuse L2 к высокоточной информации об абсолютном положении, скорости и ориентации. Кроме того, хорошая адаптивность системы IMU к окружающей среде способствует повышенной надежности эксплуатации и точности L2.
Разработчики значительно улучшили производительность системы IMU, поэтому она готова к использовать моментально после включения камеры. А дрон с камерой Zenmuse L2 также готов приступить к выполнению задач сразу же, как только RTK перейдет в статус FIX, обеспечивая более производительную работу в полевых условиях.

Размер пикселя увеличили до 3.3 μm, а эффективных пикселей теперь стало 20 Мп. Это привело к значительному улучшению всех аспектов съемки, а также обогатило цветовую детализацию облака точек. Минимальный интервал фото сократили до 0,7 секунд. Максимальное количество срабатываний затвора камеры рассчитано на 200000 раз, что значительно снижает операционные расходы. В том случае, если не нужно собирать облако точек, RGB-камера может просто вести фото- и видеосъемку или же создавать снимки для картографии в видимом свете.
1. Измерения проводились в лабораторной среде DJI при следующих условиях: Zenmuse L2 установлен на Matrice 350 RTK и включен. Использование зоны маршрута в приложении DJI Pilot 2 для планирования маршрута полета (с включенной функцией калибровки IMU). Использование повторяющегося сканирования с RTK в состоянии FIX. Относительная высота была установлена в 150 м, скорость полета 15 м/с, угол наклона подвеса -90°, длина каждого прямого участка маршрута полета составляла менее 1500 м. Поле содержало объекты, форма которых имела очевидные углы, использовались наземные контрольные точки, соответствующие модели рассеянного отражения. Приложение DJI Terra использовалось для постобработки с включенной функцией "Оптимизировать точность облака точек". Когда опция "Оптимизировать точность облака точек" была отключена, точность по вертикали составила 4 см, а точность по горизонтали — 8 см.
2. Измерения проводились с помощью Zenmuse L2, установленного на Matrice 350 RTK, со скоростью полета 15 м/с, высотой полета 150 м, коэффициентом бокового перекрытия 20%, включенной калибровкой IMU, отключенной оптимизацией высоты и отключенным отслеживанием рельефа местности.
3. Представленные данные являются типовыми значениями. Измерения проводились на плоском объекте размером больше диаметра лазерного луча, с перпендикулярным углом падения и видимостью 23 км. В условиях низкой освещенности лазерные лучи могут достичь оптимальной дальности обнаружения. Если лазерный луч попадает более чем на один объект, общая мощность лазерного передатчика делится и достижимая дальность уменьшается. Максимальная дальность обнаружения составляет 500 м.
4. После включения питания IMU не требует подготовки; однако пользователи должны дождаться, пока RTK дрона перейдет в статус FIX, после чего можно перейти к полетам и выполнению работ.
5. Рассчитано путем сравнения с Zenmuse L1.
6. Измерения проводились в лабораторной среде DJI при следующих условиях: Zenmuse L2 установлен на Matrice 350 RTK и включен. Использование зоны маршрута в приложении DJI Pilot 2 для планирования маршрута полета (с включенной функцией калибровки IMU). РТК в статусе FIX. Относительная высота была установлена 150 м, скорость полета 15 м/с, угол наклона подвеса -90°, длина каждого прямого участка маршрута полета составляла менее 1500 м.
7. 3D-модели обрабатываются с помощью разреженного представления.
8. Поддерживается создание только отчетов о качестве маршрутных точек, зон и линейных задач.
| Название продукта | Zenmuse L2 |
|---|---|
| Размеры | 155 × 128 × 176 мм (Д × Ш × В) |
| Вес | 905±5 грамм |
| Мощность | 28 Вт (обычная) 58 Вт (макс.) |
| Класс защиты | IP54 |
| Совместимые дроны | Matrice 300 RTK (нужен пульт DJI RC Plus) Matrice 350 RTK |
| Диапазон температур хранения | От -20° до 60°C |
| Диапазон обнаружения | 450 м при коэффициенте отражения 50%, 0 клк 250 м при коэффициенте отражения 10%, 100 клк Типичные данные. Получены при использовании плоского объекта размерами больше размеров диаметра лазерного пучка, при перпендикулярном угле падения и видимости в атмосфере 23 км. В условиях низкой освещенности лазерные лучи могут достичь оптимальной дальности обнаружения. Если пучок лазерного луча попадает более чем на один объект, общая мощность лазерного передатчика разделяется, а достижимый диапазон снижается. Максимальная дальность обнаружения составляет 500 м. |
|---|---|
| Скорость создания облака точек | Одно отражение: макс. 240000 точек/сек Несколько отражений: макс. 1200000 точек/сек |
| Точность системы | По горизонтали: 5 см при 150 м По вертикали: 4 см при 150 м Данные получены в условиях лабораторного окружения DJI: система Zenmuse L2 была установлена на дрон Matrice 350 RTK и включена. Использовалась функция Area Route в приложении DJI Pilot 2 для планирования полетного маршрута (с включённой калибровкой инерциального модуля). Использовалось повторяющееся сканирование с помощью RTK в статусе FIX. Относительная высота установлена на 150 м, скорость полета до 15 м/сек, крен подвеса до -90°, а каждый прямой участок полетного маршрута составлял менее 1500 м. В поле зрения были объекты с явными угловатыми формами, и использовали открытые контрольные наземные точки, соответствующие модели диффузного отражения. Для постобработки использовалось приложение DJI Terra с включённой функцией Optimize Point Cloud Accuracy. В таких же условиях тестирования, но с отключенной функцией Optimize Point Cloud Accuracy, точность по вертикали составила 4 см, а по горизонтали - 8 см. |
| Кодировка цвета облака точек в реальном времени | Коэффициент отражения, высота, расстояние, RGB |
| Точность по дальности (RMS 1σ) | 2 см при 150 м Данные получены при температуре окружающей среды +25°C, с объектом, у которого коэффициент отражения составлял 80%, на расстоянии 150 м. Реальные условия могут отличаться от тестируемых. Данные приводятся только для справки. |
|---|---|
| Макс. поддерживаемое число отражений | 5 |
| Режимы сканирования | Неповторяющаяся и повторяющаяся схема сканирования |
| Угол обзора | При повторяющейся схеме сканирования: по горизонтали 70°, по вертикали 3° При неповторяющейся схеме сканирования: по горизонтали 70°, по вертикали 75° |
| Минимальная дистанция обнаружения | 3 м |
| Расхождение лазерного пучка | По горизонтали 0,2 мрад, по вертикали 0,6 мрад Измерено на полной ширине на половине высоты (ПШПВ). 0,6 мрад означает, что на каждые 100 метров расстояния диаметр лазерного луча увеличивается на 6 см. |
| Длина волны лазера | 905 нм |
| Размер лазерного пятна | По горизонтали 4 см, по вертикали 12 см при 100 м (ПШПВ) |
| Частота излучения лазерного импульса | 240 кГц |
| Уровень безопасности лазера | Класс 1 (IEC 60825-1:2014) |
| Доступный предел выбросов (AEL) | 233,59 нДж |
| Эталонная диафрагма | Эффективная диафрагма: 23,85 мм (эквивалентная круговой) |
| Макс. мощность излучения лазерного импульса в течение 5 наносекунд | 46,718 Вт |
| Частота обновления инерциального модуля | 200 Гц |
|---|---|
| Диапазон измерений акселерометра | ±6 g |
| Диапазон измерителя угловой скорости | ±300 dps |
| Точность измерения отклонений (RMS 1σ) | В реальном времени: 0.2°, При пост-обработке: 0.05° Измерения проводились в лабораторной среде DJI в следующих условиях: Zenmuse L2 установлен на Matrice 350 RTK и включен. Использовалась зона маршрута (Area Route) в приложении DJI Pilot 2 для планирования маршрута полета (с включенной функцией калибровки IMU). РТК в статусе FIX. Относительная высота была установлена в 150 м, скорость полета 15 м/с, угол наклона подвеса -90°, длина каждого прямого участка маршрута полета составляла менее 1500 м. |
| Точность крена/поворота (RMS 1σ) | В реальном времени: 0.05°, При пост-обработке: 0.025° Измерения проводились в лабораторной среде DJI в следующих условиях: Zenmuse L2 установлен на Matrice 350 RTK и включен. Использовалась зона маршрута (Area Route) в приложении DJI Pilot 2 для планирования маршрута полета (с включенной функцией калибровки IMU). РТК в статусе FIX. Относительная высота была установлена в 150 м, скорость полета 15 м/с, угол наклона подвеса -90°, длина каждого прямого участка маршрута полета составляла менее 1500 м. |
| Точность горизонтального позиционирования | RTK FIX: 1 см + 1 ppm |
| Точность вертикального позиционирования | RTK FIX: 1,5 см + 1 ppm |
| Матрица | 4/3 CMOS, эффективных пикселей: 20 Мп |
|---|---|
| Объектив | Угол обзора: 84° ЭФР: 24 мм Диафрагма: f/2.8-f/11 Фокусное расстояние: от 1 м до ∞ (с автофокусом) |
| Скорость затвора | Механический затвор: 2-1/2000 сек Электронный затвор: 2-1/8000 сек |
| Количество срабатываний затвора | 200000 |
| Размер фото | 5280×3956 (4:3) |
| Режимы фотосъемки | Однокадровая: 20 Мп С выдержкой: 20 MP Интервальная с выдержкой (JPEG): 0.7/1/2/3/5/7/10/15/20/30/60 сек Интервальная с выдержкой (RAW/JPEG + RAW): 2/3/5/7/10/15/20/30/60 сек |
| Видеокодек и разрешение | H.264 4K: 3840×2160 при 30 кадрах в сек. FHD: 1920×1080 при 30 кадрах в сек. |
| Диапазон ISO | Видео: 100-6400 Фото: 100-6400 |
| Скорость передачи видео | 4K: 85 Мбит/сек FHD: 30 Мбит/сек |
| Поддерживаемая файловая система | exFAT |
| Формат фотографий | JPEG/DNG (RAW) |
| Формат видео | MP4 (MPEG-4 AVC/H.264) |
| Система стабилизации | 3-осевая (наклон, вращение, панорамирование) |
|---|---|
| Диапазон угловых вибраций | 0.01° |
| Метод установки | С помощью съемного модуля DJI SKYPORT |
| Механический диапазон | Наклон: от -143° до +43° Панорамирование: ±105° * Структурный предел, неконтролируемый диапазон. |
| Управляемый диапазон | Наклон: от -120° до +30° Панорамирование: ±90° |
| Рабочий режим | Следование/Свободный/Перецентрирование |
| Хранение первоначальных данных | Фото/данные IMU/облако точек/навигационные данные/файлы калибровки |
|---|---|
| Хранение данных облака точек | Хранение данных моделирования в реальном времени |
| Совместимые карты microSD | microSD: Скорость последовательной записи 50 МБ/с или выше и рейтинг скорости UHS-I 3 или выше; Максимальная емкость: 256 ГБ. Используйте рекомендуемые карты microSD. |
| Рекомендуемые карты microSD | Lexar 1066x 64GB U3 A2 V30 microSDXC Lexar 1066x 128GB U3 A2 V30 microSDXC Kingston Canvas Go! Plus 128GB U3 A2 V30 microSDXC Lexar 1066x 256GB U3 A2 V30 microSDXC |
| Совместимое ПО | DJI Terra |
|---|---|
| Формат данных | DJI Terra поддерживает экспорт моделей облаков точек в следующих форматах: PNTS/LAS/PLY/PCD/S3MB |




В контролируемых лабораторных условиях защита Zenmuse L2 соответствует требованиям класса IP54 в рамках стандарта IEC60529. Чтобы обеспечить соответствие высшему классу защиты:
Уровень защиты будет снижаться в следствие эксплуатации устройства и его износа.
Zenmuse L2 совместим с дронами Matrice 350 RTK и Matrice 300 RTK, а также только с пультом дистанционного управления DJI RC Plus. Перед эксплуатацией обновите прошивку дрона и пульта управления до самой последней версии. Чтобы обеспечить точность картографирования, установите подвес с камерой L2 на один нижний подвес. А также подключите кабель к правому порту USB-C (если смотреть на дрон).
При повторяющемся сканировании: по горизонтали 70°, по вертикали 3°
При неповторяющемся сканировании: по горизонтали 70°, по вертикали 75°
Дистанция обнаружения:
250 м при коэффициенте отражения 10%, 100 клк
450 м при коэффициенте отражения 50%, 0 клк
Рекомендуемая рабочая высота: 30-150 м
Zenmuse L2 поддерживает 5 типов отражений: одинарное отражение (сильнейшее эхо), два отражения, три отражения, четыре отражения и пять отражений.
При одном отражении: макс. 240000 точек/сек
При многократных отражениях: макс. 1200000 точек/сек
У Zenmuse L2 есть 2 режима сканирования: неповторяющийся и повторяющийся.
В режиме повторяющегося сканирования LiDAR может выполнять более однородное и точное сканирование, что соответствует требованиям картографии высокой точности.
В режиме неповторяющегося сканирования модуль может выполнять более глубокое проникновение для сбора большего объема структурной информации. Это больше подходит для выполнения инспекций линий электропередач, исследования лесов и других схожих миссий.
Точность рыскания: в реальном времени: 0,2°, при пост-обработке: 0,05°
Точность тангажа/крена: в реальном времени 0,05°, при пост-обработке 0,025°
Точность горизонтального позиционирования: 1 см + 1 ppm (RTK FIX)
Точность вертикального позиционирования: 1,5 см + 1 ppm (RTK FIX)
Данные о точности рыскания, а также тангажа/крена получены в следующих лабораторных условиях DJI:
Zenmuse L2 был установлен на дрон Matrice 350 RTK и включен. Для планирования полетного маршрута использовали режим "Зона маршрута" в приложении DJI Pilot 2 (с включенной калибровкой инерциального модуля). Система RTK находилась в положении FIX. Относительная высота была установлена на 150 м, полетная скорость на 15 м/сек, угол тангажа подвеса на -90°, а каждый прямой участок полетного маршрута был меньше 1500 м.
При сборе данных облака точек RGB-камера может поставлять для данных цветовую информацию в режиме реального времени, а создаваемые фотографии использовать для реконструкции двухмерных RGB-моделей. Если нет задачи по сбору данных для облака точек, то RGB-камера может фотографировать или снимать видео, а также собирать кадры для создания двух- и трехмерных RGB-моделей.
По горизонтали: 5 см
По вертикали: 4 см
Данные получены в следующих лабораторных условиях DJI: Zenmuse L2 был установлен на дрон Matrice 350 RTK и включен. Для планирования полетного маршрута использовали режим "Зона маршрута" в приложении DJI Pilot 2 (с включенной калибровкой инерциального модуля). Режим повторяющегося сканирования работал с RTK в положении FIX. Относительная высота была установлена на 150 м, полетная скорость на 15 м/сек, угол тангажа подвеса на -90°, а каждый прямой участок полетного маршрута был меньше 1500 м. Объекты в поле были с явными углами, а также использовались наземные контрольные точки, которые соответствовали модели рассеянного отражения. Приложение DJI Terra использовали для пост-обработки с включенной оптимизацией точности облака точек. В схожих условиях режим оптимизации точности облака точек был выключен, точность по вертикали составила 4 см, а по горизонтали - 8 см.
В RGB-камере установлена CMOS-матрица 4/3, размер пикселя составляет 3.3 × 3.3 μm.
Улучшена производительность LiDAR за счет увеличения пятна лазера до примерно 1/5 размера пятна L1 в условиях, когда интересующий объект или область находятся на расстоянии 100 м от LiDAR. Проникающая способность LiDAR была значительно увеличена, а его дальность обнаружения и точность также возросли. Размер пикселя RGB-камеры увеличился на 89% по сравнению с размером пикселя у L1. Точность инерциального модуля повысилась до 0,05° (в реальном времени) и до 0,025° (при пост-обработке). LiDAR поддерживает лазерный дальномер (RNG).
Zenmuse L2 способна собрать данные за один полет на площади до 2,5 кв. км.
Данные получены при установке Zenmuse L2 на дрон Matrice 350 RTK при полетной скорости 15 м/сек, высоте полета 150 м, коэффициенте поперечного перекрытия 20%, при включенной калибровке инерциального модуля, выключенном режиме оптимизации и выключенном режиме следования рельефу.
Zenmuse L2 можно широко использовать в самых разных полетных миссиях, включая топографические исследования и картографию, моделирование строительства ЛЭП, управления лесным хозяйством, исследовательских измерениях и многом другом.
Карта SD с последовательной скоростью записи в 50 Мб/сек или выше и классом скорости UHS-I Speed Grade 3 или выше; макс. емкость 256 Гб.
Lexar 1066x 64GB U3 A2 V30 microSDXC
Lexar 1066x 128GB U3 A2 V30 microSDXC
Kingston Canvas Go! Plus 128GB U3 A2 V30 microSDXC
Lexar 1066x 256GB U3 A2 V30 microSDXC
При сборе первоначальных данных для облака точек Zenmuse L2 может генерировать и отображать в реальном времени модель облака точек в приложении DJI Pilot 2 с обработкой в разреженном разрешении. Есть поддержка 4 цветовых режимов, включая коэффициент отражения, высоту, расстояние и RGB. При просмотре моделей в альбоме на пульте дистанционного управления вы можете вращать, перетаскивать, масштабировать, быстро переключать перспективу и рецентрировать обзор.
В настоящее время L2 поддерживает следующие полетные задачи и режимы: Waypoint Route, Area Route и Linear Route.
Чтобы обеспечить точность собираемых данных, нужно включить функцию калибровки инерциального модуля (Calibrate IMU). Перед выполнением полетного задания включите функцию Calibrate IMU. Перед выполнением полета в ручном режиме вы можете нажать "Calibrate" перед непосредственным выполнением работы, чтобы запустить калибровку вручную. Во время работы каждое новое ручное включение калибровки инерциального модуля делается на основе уведомлений об обратном отсчете.
Отчет о качестве задачи записывает актуальные данные LiDAR, камеры и модуля IMU. Операторы могут судить о достоверности сбора данных на основе состояния каждого модуля.
CLC (файл калибровки LiDAR)
CLI (файл калибровки IMU LiDAR)
LDR (данные LiDAR)
RTK (данные RTK с основной антенны)
RTL (данные компенсации полюса RTK)
RTS (данные RTK со вспомогательной антенны)
RTB (данные базовой станции RTCM)
IMU (первоначальные данные IMU)
SIG (файл сигнатуры PPK)
LDRT (файл облака точек для просмотра в приложении)
RPT (отчет о качестве облака точек)
RPOS (данные POS-решения в режиме реального времени)
JPG (фотографии, созданные в полете)
В состоянии FIX RTK разницы в точности между ними нет.
Да. Операторы могут просматривать текущую коллекцию облаков точек на дисплее облаков точек в режиме реального времени, а также быстро просматривать записанную точку облачной трехмерной модели. После завершения операции вы можете загрузить и просмотреть трехмерную модель облака точек в библиотеке, а также выполнить такие операции, как объединение трехмерных моделей облака точек, созданных за несколько полетов.
Такие операции, как воспроизведение и объединение моделей, необходимо выполнять, только когда коптер и Zenmuse L2 подключены друг к другу.
Нет. Это не является соответствием 1 в 1. И просмотр в реальном времени, и воспроизведение трехмерных моделей облаков точек обрабатываются в разреженным разрешением. По количеству облаков точек и точности такой вариант отличается от модели, созданной в DJI Terra.
Запустите DJI Terra, чтобы создать новую задачу "Облако точек LiDAR". Следуйте инструкциям, чтобы импортировать данные с SD-карты в DJI Terra и выполните соответствующие настройки. После этого можно приступить к высокоточному моделированию.
Форматы облака точек следующие: PNTS, LAS, PLY, PCD, S3MB. Форматы траектории следующие: sbet.out, sbet.txt
Диапазон отражательной способности составляет от 0 до 255, при этом от 0 до 150 соответствует коэффициенту отражения от 0 до 100% при диффузном отражении Ламберта, а от 151 до 255 соответствует полному коэффициенту отражения.
Значение коэффициента отражения связано с множеством факторов, таких как топография поверхности географического объекта, условия освещения и угол падения, и оно не может строго соответствовать абсолютному коэффициенту отражения.
Zenmuse L2 объединила в одном корпусе LiDAR, высокоточную систему IMU собственной разработки и картографическую RGB-камеру с CMOS-матрицей размером 4/3. Предоставляемая в ваше распоряжение система обеспечит беспилотным промышленным платформам DJI более точный, эффективный и надежный сбор геопространственных данных. А при работе с приложением DJI Terra система становится готовым решением для сбора трехмерных данных и их высокоточной пост-обработки.
Высокая точность
Исключительная эффективность
Большая глубина проницаемости
Эффективный диапазон обнаружения[3]
5 отражений
Готовое решение[4]
Облако точек в LiveView
Обработка в DJI Terra в 1 клик
Благодаря мощному аппаратному обеспечению Zenmuse L2 способна выполнить точное сканирование сложных объектов в расширенном диапазоне и с большей скоростью получить облако точек. Во время операций пользователи могут просматривать, воспроизводить и обрабатывать модели облаков точек на в реальном режиме времени прямо на месте проведения полетных миссий. В этом помогут также составленные в DJI Terra отчеты о качестве выполняемых. Такое подход предлагает простое и универсальное решение для повышения общей эффективности, а также получения результатов высокой точности с помощью комплексной пост-обработки.
Объединение возможностей систем глобального позиционирования и высокоточного инерциального модуля собственной разработки помогает добиться 4-см точности по вертикали и 5-см точности по горизонтали.[1]
Система готова к работе сразу же после ее включения. Она способна собирать геопространственные и RGB-данные с участка площадью 2,5 кв. км всего за один полет.[2]
При использовании вместе с промышленным квадрокоптером Matrice 350 RTK и приложением DJI Terra, Zenmuse L2 представляет собой готовое к работе решение, которое просто использовать даже новичкам.
L2 может обнаружить объекты на расстоянии от 250 метров при коэффициенте отражения 10% и 100 клкс[3] и на расстоянии до 450 метров при коэффициенте отражения 50% и 0 клк[3]. Обычная рабочая высота теперь увеличена до 120 метров. Это значительно повысит безопасность эксплуатации и эффективность.
Размер лазерного пятна был уменьшен до 4×12 см на 100 м. Это всего лишь 1/5 размера лазерного пятна у камеры Zenmuse L1. Но с пятном меньшего размера Zenmuse L2 не только обнаруживает объекты гораздо меньшего размера, чем предыдущие камеры, но и может проникать в более густую растительность, создавая более точные цифровые модели рельефа (DEM).
Такой режим полезен при работе в районах с густой растительностью, где Zenmuse L2 сможет фиксировать больше наземной информации, даже если она скрывается под густой листвой.
Как в режиме одиночного, так и в множественном сканирования L2 может достигать максимальной скорости создания облаков точек в 240000 точек в секунду. Это помогает получать больше данных за определенный период времени.
L2 поддерживает два режима сканирования для большей гибкости в работе в зависимости от специфики задач. В режиме повторяющегося сканирования LiDAR Zenmuse L2 может создавать более однородные и точные облака точек, одновременно выполняя задачи высокоточного картографирования. В режиме неповторяющегося сканирования система обеспечивает более глубокое проникновение для получения большего количества структурной информации. Это полезно для проверки линий электропередач, съемок в лесном хозяйстве и в других операциях.
Конструкция в едином корпусе обеспечивает эффективную скорость передачи данных облака точек до 100%. Вместе с 3-осевым стабилизатором система открывает больше возможностей для съемки.
Высокоточная система IMU собственной разработки в сочетании с системой позиционирования RTK дрона для объединения данных во время пост-обработки обеспечивает доступ Zenmuse L2 к высокоточной информации об абсолютном положении, скорости и ориентации. Кроме того, хорошая адаптивность системы IMU к окружающей среде способствует повышенной надежности эксплуатации и точности L2.
Разработчики значительно улучшили производительность системы IMU, поэтому она готова к использовать моментально после включения камеры. А дрон с камерой Zenmuse L2 также готов приступить к выполнению задач сразу же, как только RTK перейдет в статус FIX, обеспечивая более производительную работу в полевых условиях.
Размер пикселя увеличили до 3.3 μm, а эффективных пикселей теперь стало 20 Мп. Это привело к значительному улучшению всех аспектов съемки, а также обогатило цветовую детализацию облака точек. Минимальный интервал фото сократили до 0,7 секунд. Максимальное количество срабатываний затвора камеры рассчитано на 200000 раз, что значительно снижает операционные расходы. В том случае, если не нужно собирать облако точек, RGB-камера может просто вести фото- и видеосъемку или же создавать снимки для картографии в видимом свете.
1. Измерения проводились в лабораторной среде DJI при следующих условиях: Zenmuse L2 установлен на Matrice 350 RTK и включен. Использование зоны маршрута в приложении DJI Pilot 2 для планирования маршрута полета (с включенной функцией калибровки IMU). Использование повторяющегося сканирования с RTK в состоянии FIX. Относительная высота была установлена в 150 м, скорость полета 15 м/с, угол наклона подвеса -90°, длина каждого прямого участка маршрута полета составляла менее 1500 м. Поле содержало объекты, форма которых имела очевидные углы, использовались наземные контрольные точки, соответствующие модели рассеянного отражения. Приложение DJI Terra использовалось для постобработки с включенной функцией "Оптимизировать точность облака точек". Когда опция "Оптимизировать точность облака точек" была отключена, точность по вертикали составила 4 см, а точность по горизонтали — 8 см.
2. Измерения проводились с помощью Zenmuse L2, установленного на Matrice 350 RTK, со скоростью полета 15 м/с, высотой полета 150 м, коэффициентом бокового перекрытия 20%, включенной калибровкой IMU, отключенной оптимизацией высоты и отключенным отслеживанием рельефа местности.
3. Представленные данные являются типовыми значениями. Измерения проводились на плоском объекте размером больше диаметра лазерного луча, с перпендикулярным углом падения и видимостью 23 км. В условиях низкой освещенности лазерные лучи могут достичь оптимальной дальности обнаружения. Если лазерный луч попадает более чем на один объект, общая мощность лазерного передатчика делится и достижимая дальность уменьшается. Максимальная дальность обнаружения составляет 500 м.
4. После включения питания IMU не требует подготовки; однако пользователи должны дождаться, пока RTK дрона перейдет в статус FIX, после чего можно перейти к полетам и выполнению работ.
5. Рассчитано путем сравнения с Zenmuse L1.
6. Измерения проводились в лабораторной среде DJI при следующих условиях: Zenmuse L2 установлен на Matrice 350 RTK и включен. Использование зоны маршрута в приложении DJI Pilot 2 для планирования маршрута полета (с включенной функцией калибровки IMU). РТК в статусе FIX. Относительная высота была установлена 150 м, скорость полета 15 м/с, угол наклона подвеса -90°, длина каждого прямого участка маршрута полета составляла менее 1500 м.
7. 3D-модели обрабатываются с помощью разреженного представления.
8. Поддерживается создание только отчетов о качестве маршрутных точек, зон и линейных задач.
| Название продукта | Zenmuse L2 |
|---|---|
| Размеры | 155 × 128 × 176 мм (Д × Ш × В) |
| Вес | 905±5 грамм |
| Мощность | 28 Вт (обычная) 58 Вт (макс.) |
| Класс защиты | IP54 |
| Совместимые дроны | Matrice 300 RTK (нужен пульт DJI RC Plus) Matrice 350 RTK |
| Диапазон температур хранения | От -20° до 60°C |
| Диапазон обнаружения | 450 м при коэффициенте отражения 50%, 0 клк 250 м при коэффициенте отражения 10%, 100 клк Типичные данные. Получены при использовании плоского объекта размерами больше размеров диаметра лазерного пучка, при перпендикулярном угле падения и видимости в атмосфере 23 км. В условиях низкой освещенности лазерные лучи могут достичь оптимальной дальности обнаружения. Если пучок лазерного луча попадает более чем на один объект, общая мощность лазерного передатчика разделяется, а достижимый диапазон снижается. Максимальная дальность обнаружения составляет 500 м. |
|---|---|
| Скорость создания облака точек | Одно отражение: макс. 240000 точек/сек Несколько отражений: макс. 1200000 точек/сек |
| Точность системы | По горизонтали: 5 см при 150 м По вертикали: 4 см при 150 м Данные получены в условиях лабораторного окружения DJI: система Zenmuse L2 была установлена на дрон Matrice 350 RTK и включена. Использовалась функция Area Route в приложении DJI Pilot 2 для планирования полетного маршрута (с включённой калибровкой инерциального модуля). Использовалось повторяющееся сканирование с помощью RTK в статусе FIX. Относительная высота установлена на 150 м, скорость полета до 15 м/сек, крен подвеса до -90°, а каждый прямой участок полетного маршрута составлял менее 1500 м. В поле зрения были объекты с явными угловатыми формами, и использовали открытые контрольные наземные точки, соответствующие модели диффузного отражения. Для постобработки использовалось приложение DJI Terra с включённой функцией Optimize Point Cloud Accuracy. В таких же условиях тестирования, но с отключенной функцией Optimize Point Cloud Accuracy, точность по вертикали составила 4 см, а по горизонтали - 8 см. |
| Кодировка цвета облака точек в реальном времени | Коэффициент отражения, высота, расстояние, RGB |
| Точность по дальности (RMS 1σ) | 2 см при 150 м Данные получены при температуре окружающей среды +25°C, с объектом, у которого коэффициент отражения составлял 80%, на расстоянии 150 м. Реальные условия могут отличаться от тестируемых. Данные приводятся только для справки. |
|---|---|
| Макс. поддерживаемое число отражений | 5 |
| Режимы сканирования | Неповторяющаяся и повторяющаяся схема сканирования |
| Угол обзора | При повторяющейся схеме сканирования: по горизонтали 70°, по вертикали 3° При неповторяющейся схеме сканирования: по горизонтали 70°, по вертикали 75° |
| Минимальная дистанция обнаружения | 3 м |
| Расхождение лазерного пучка | По горизонтали 0,2 мрад, по вертикали 0,6 мрад Измерено на полной ширине на половине высоты (ПШПВ). 0,6 мрад означает, что на каждые 100 метров расстояния диаметр лазерного луча увеличивается на 6 см. |
| Длина волны лазера | 905 нм |
| Размер лазерного пятна | По горизонтали 4 см, по вертикали 12 см при 100 м (ПШПВ) |
| Частота излучения лазерного импульса | 240 кГц |
| Уровень безопасности лазера | Класс 1 (IEC 60825-1:2014) |
| Доступный предел выбросов (AEL) | 233,59 нДж |
| Эталонная диафрагма | Эффективная диафрагма: 23,85 мм (эквивалентная круговой) |
| Макс. мощность излучения лазерного импульса в течение 5 наносекунд | 46,718 Вт |
| Частота обновления инерциального модуля | 200 Гц |
|---|---|
| Диапазон измерений акселерометра | ±6 g |
| Диапазон измерителя угловой скорости | ±300 dps |
| Точность измерения отклонений (RMS 1σ) | В реальном времени: 0.2°, При пост-обработке: 0.05° Измерения проводились в лабораторной среде DJI в следующих условиях: Zenmuse L2 установлен на Matrice 350 RTK и включен. Использовалась зона маршрута (Area Route) в приложении DJI Pilot 2 для планирования маршрута полета (с включенной функцией калибровки IMU). РТК в статусе FIX. Относительная высота была установлена в 150 м, скорость полета 15 м/с, угол наклона подвеса -90°, длина каждого прямого участка маршрута полета составляла менее 1500 м. |
| Точность крена/поворота (RMS 1σ) | В реальном времени: 0.05°, При пост-обработке: 0.025° Измерения проводились в лабораторной среде DJI в следующих условиях: Zenmuse L2 установлен на Matrice 350 RTK и включен. Использовалась зона маршрута (Area Route) в приложении DJI Pilot 2 для планирования маршрута полета (с включенной функцией калибровки IMU). РТК в статусе FIX. Относительная высота была установлена в 150 м, скорость полета 15 м/с, угол наклона подвеса -90°, длина каждого прямого участка маршрута полета составляла менее 1500 м. |
| Точность горизонтального позиционирования | RTK FIX: 1 см + 1 ppm |
| Точность вертикального позиционирования | RTK FIX: 1,5 см + 1 ppm |
| Матрица | 4/3 CMOS, эффективных пикселей: 20 Мп |
|---|---|
| Объектив | Угол обзора: 84° ЭФР: 24 мм Диафрагма: f/2.8-f/11 Фокусное расстояние: от 1 м до ∞ (с автофокусом) |
| Скорость затвора | Механический затвор: 2-1/2000 сек Электронный затвор: 2-1/8000 сек |
| Количество срабатываний затвора | 200000 |
| Размер фото | 5280×3956 (4:3) |
| Режимы фотосъемки | Однокадровая: 20 Мп С выдержкой: 20 MP Интервальная с выдержкой (JPEG): 0.7/1/2/3/5/7/10/15/20/30/60 сек Интервальная с выдержкой (RAW/JPEG + RAW): 2/3/5/7/10/15/20/30/60 сек |
| Видеокодек и разрешение | H.264 4K: 3840×2160 при 30 кадрах в сек. FHD: 1920×1080 при 30 кадрах в сек. |
| Диапазон ISO | Видео: 100-6400 Фото: 100-6400 |
| Скорость передачи видео | 4K: 85 Мбит/сек FHD: 30 Мбит/сек |
| Поддерживаемая файловая система | exFAT |
| Формат фотографий | JPEG/DNG (RAW) |
| Формат видео | MP4 (MPEG-4 AVC/H.264) |
| Система стабилизации | 3-осевая (наклон, вращение, панорамирование) |
|---|---|
| Диапазон угловых вибраций | 0.01° |
| Метод установки | С помощью съемного модуля DJI SKYPORT |
| Механический диапазон | Наклон: от -143° до +43° Панорамирование: ±105° * Структурный предел, неконтролируемый диапазон. |
| Управляемый диапазон | Наклон: от -120° до +30° Панорамирование: ±90° |
| Рабочий режим | Следование/Свободный/Перецентрирование |
| Хранение первоначальных данных | Фото/данные IMU/облако точек/навигационные данные/файлы калибровки |
|---|---|
| Хранение данных облака точек | Хранение данных моделирования в реальном времени |
| Совместимые карты microSD | microSD: Скорость последовательной записи 50 МБ/с или выше и рейтинг скорости UHS-I 3 или выше; Максимальная емкость: 256 ГБ. Используйте рекомендуемые карты microSD. |
| Рекомендуемые карты microSD | Lexar 1066x 64GB U3 A2 V30 microSDXC Lexar 1066x 128GB U3 A2 V30 microSDXC Kingston Canvas Go! Plus 128GB U3 A2 V30 microSDXC Lexar 1066x 256GB U3 A2 V30 microSDXC |
| Совместимое ПО | DJI Terra |
|---|---|
| Формат данных | DJI Terra поддерживает экспорт моделей облаков точек в следующих форматах: PNTS/LAS/PLY/PCD/S3MB |
В контролируемых лабораторных условиях защита Zenmuse L2 соответствует требованиям класса IP54 в рамках стандарта IEC60529. Чтобы обеспечить соответствие высшему классу защиты:
Уровень защиты будет снижаться в следствие эксплуатации устройства и его износа.
Zenmuse L2 совместим с дронами Matrice 350 RTK и Matrice 300 RTK, а также только с пультом дистанционного управления DJI RC Plus. Перед эксплуатацией обновите прошивку дрона и пульта управления до самой последней версии. Чтобы обеспечить точность картографирования, установите подвес с камерой L2 на один нижний подвес. А также подключите кабель к правому порту USB-C (если смотреть на дрон).
При повторяющемся сканировании: по горизонтали 70°, по вертикали 3°
При неповторяющемся сканировании: по горизонтали 70°, по вертикали 75°
Дистанция обнаружения:
250 м при коэффициенте отражения 10%, 100 клк
450 м при коэффициенте отражения 50%, 0 клк
Рекомендуемая рабочая высота: 30-150 м
Zenmuse L2 поддерживает 5 типов отражений: одинарное отражение (сильнейшее эхо), два отражения, три отражения, четыре отражения и пять отражений.
При одном отражении: макс. 240000 точек/сек
При многократных отражениях: макс. 1200000 точек/сек
У Zenmuse L2 есть 2 режима сканирования: неповторяющийся и повторяющийся.
В режиме повторяющегося сканирования LiDAR может выполнять более однородное и точное сканирование, что соответствует требованиям картографии высокой точности.
В режиме неповторяющегося сканирования модуль может выполнять более глубокое проникновение для сбора большего объема структурной информации. Это больше подходит для выполнения инспекций линий электропередач, исследования лесов и других схожих миссий.
Точность рыскания: в реальном времени: 0,2°, при пост-обработке: 0,05°
Точность тангажа/крена: в реальном времени 0,05°, при пост-обработке 0,025°
Точность горизонтального позиционирования: 1 см + 1 ppm (RTK FIX)
Точность вертикального позиционирования: 1,5 см + 1 ppm (RTK FIX)
Данные о точности рыскания, а также тангажа/крена получены в следующих лабораторных условиях DJI:
Zenmuse L2 был установлен на дрон Matrice 350 RTK и включен. Для планирования полетного маршрута использовали режим "Зона маршрута" в приложении DJI Pilot 2 (с включенной калибровкой инерциального модуля). Система RTK находилась в положении FIX. Относительная высота была установлена на 150 м, полетная скорость на 15 м/сек, угол тангажа подвеса на -90°, а каждый прямой участок полетного маршрута был меньше 1500 м.
При сборе данных облака точек RGB-камера может поставлять для данных цветовую информацию в режиме реального времени, а создаваемые фотографии использовать для реконструкции двухмерных RGB-моделей. Если нет задачи по сбору данных для облака точек, то RGB-камера может фотографировать или снимать видео, а также собирать кадры для создания двух- и трехмерных RGB-моделей.
По горизонтали: 5 см
По вертикали: 4 см
Данные получены в следующих лабораторных условиях DJI: Zenmuse L2 был установлен на дрон Matrice 350 RTK и включен. Для планирования полетного маршрута использовали режим "Зона маршрута" в приложении DJI Pilot 2 (с включенной калибровкой инерциального модуля). Режим повторяющегося сканирования работал с RTK в положении FIX. Относительная высота была установлена на 150 м, полетная скорость на 15 м/сек, угол тангажа подвеса на -90°, а каждый прямой участок полетного маршрута был меньше 1500 м. Объекты в поле были с явными углами, а также использовались наземные контрольные точки, которые соответствовали модели рассеянного отражения. Приложение DJI Terra использовали для пост-обработки с включенной оптимизацией точности облака точек. В схожих условиях режим оптимизации точности облака точек был выключен, точность по вертикали составила 4 см, а по горизонтали - 8 см.
В RGB-камере установлена CMOS-матрица 4/3, размер пикселя составляет 3.3 × 3.3 μm.
Улучшена производительность LiDAR за счет увеличения пятна лазера до примерно 1/5 размера пятна L1 в условиях, когда интересующий объект или область находятся на расстоянии 100 м от LiDAR. Проникающая способность LiDAR была значительно увеличена, а его дальность обнаружения и точность также возросли. Размер пикселя RGB-камеры увеличился на 89% по сравнению с размером пикселя у L1. Точность инерциального модуля повысилась до 0,05° (в реальном времени) и до 0,025° (при пост-обработке). LiDAR поддерживает лазерный дальномер (RNG).
Zenmuse L2 способна собрать данные за один полет на площади до 2,5 кв. км.
Данные получены при установке Zenmuse L2 на дрон Matrice 350 RTK при полетной скорости 15 м/сек, высоте полета 150 м, коэффициенте поперечного перекрытия 20%, при включенной калибровке инерциального модуля, выключенном режиме оптимизации и выключенном режиме следования рельефу.
Zenmuse L2 можно широко использовать в самых разных полетных миссиях, включая топографические исследования и картографию, моделирование строительства ЛЭП, управления лесным хозяйством, исследовательских измерениях и многом другом.
Карта SD с последовательной скоростью записи в 50 Мб/сек или выше и классом скорости UHS-I Speed Grade 3 или выше; макс. емкость 256 Гб.
Lexar 1066x 64GB U3 A2 V30 microSDXC
Lexar 1066x 128GB U3 A2 V30 microSDXC
Kingston Canvas Go! Plus 128GB U3 A2 V30 microSDXC
Lexar 1066x 256GB U3 A2 V30 microSDXC
При сборе первоначальных данных для облака точек Zenmuse L2 может генерировать и отображать в реальном времени модель облака точек в приложении DJI Pilot 2 с обработкой в разреженном разрешении. Есть поддержка 4 цветовых режимов, включая коэффициент отражения, высоту, расстояние и RGB. При просмотре моделей в альбоме на пульте дистанционного управления вы можете вращать, перетаскивать, масштабировать, быстро переключать перспективу и рецентрировать обзор.
В настоящее время L2 поддерживает следующие полетные задачи и режимы: Waypoint Route, Area Route и Linear Route.
Чтобы обеспечить точность собираемых данных, нужно включить функцию калибровки инерциального модуля (Calibrate IMU). Перед выполнением полетного задания включите функцию Calibrate IMU. Перед выполнением полета в ручном режиме вы можете нажать "Calibrate" перед непосредственным выполнением работы, чтобы запустить калибровку вручную. Во время работы каждое новое ручное включение калибровки инерциального модуля делается на основе уведомлений об обратном отсчете.
Отчет о качестве задачи записывает актуальные данные LiDAR, камеры и модуля IMU. Операторы могут судить о достоверности сбора данных на основе состояния каждого модуля.
CLC (файл калибровки LiDAR)
CLI (файл калибровки IMU LiDAR)
LDR (данные LiDAR)
RTK (данные RTK с основной антенны)
RTL (данные компенсации полюса RTK)
RTS (данные RTK со вспомогательной антенны)
RTB (данные базовой станции RTCM)
IMU (первоначальные данные IMU)
SIG (файл сигнатуры PPK)
LDRT (файл облака точек для просмотра в приложении)
RPT (отчет о качестве облака точек)
RPOS (данные POS-решения в режиме реального времени)
JPG (фотографии, созданные в полете)
В состоянии FIX RTK разницы в точности между ними нет.
Да. Операторы могут просматривать текущую коллекцию облаков точек на дисплее облаков точек в режиме реального времени, а также быстро просматривать записанную точку облачной трехмерной модели. После завершения операции вы можете загрузить и просмотреть трехмерную модель облака точек в библиотеке, а также выполнить такие операции, как объединение трехмерных моделей облака точек, созданных за несколько полетов.
Такие операции, как воспроизведение и объединение моделей, необходимо выполнять, только когда коптер и Zenmuse L2 подключены друг к другу.
Нет. Это не является соответствием 1 в 1. И просмотр в реальном времени, и воспроизведение трехмерных моделей облаков точек обрабатываются в разреженным разрешением. По количеству облаков точек и точности такой вариант отличается от модели, созданной в DJI Terra.
Запустите DJI Terra, чтобы создать новую задачу "Облако точек LiDAR". Следуйте инструкциям, чтобы импортировать данные с SD-карты в DJI Terra и выполните соответствующие настройки. После этого можно приступить к высокоточному моделированию.
Форматы облака точек следующие: PNTS, LAS, PLY, PCD, S3MB. Форматы траектории следующие: sbet.out, sbet.txt
Диапазон отражательной способности составляет от 0 до 255, при этом от 0 до 150 соответствует коэффициенту отражения от 0 до 100% при диффузном отражении Ламберта, а от 151 до 255 соответствует полному коэффициенту отражения.
Значение коэффициента отражения связано с множеством факторов, таких как топография поверхности географического объекта, условия освещения и угол падения, и оно не может строго соответствовать абсолютному коэффициенту отражения.